-

旋耕机刀轴焊接工作站解决方案
旋耕机刀轴焊接工作站解决方案采用焊接机器人配套自动上料变位机的解决方案,无需专业焊工,新手普工及时上岗。成品美观可靠,品质稳定。产品换型编程简单方便易用。
2021-03-03 aipaae
-

机器人焊接工作站的翻转变位机
机器人焊接工作站的翻转变位机构。背景技术:目前,一些机械制造企业对于支架焊接加工比较重视,比如支架焊接总成零件,在满焊过程中,为避免手工作业时焊缝外观质量差,焊接作业效率低等缺陷,大都采用机器人焊接工作站进行焊接作业。现有技术中的机器人焊接作业时,使用的翻转变位机构都是单工位或手动操作,存在定位精度低,劳动效率低的缺点。因此,研制一种结构紧凑、操作灵便,能与机器人焊接工作站配套使用的翻转变位机构,
2019-12-17 aipaae
-

汽车零配件弧焊机器人工作站的制作方法
汽车零配件弧焊机器人工作站的制作方法 【专利摘要】一种汽车零配件弧焊机器人工作站,其特征是它由弧焊机器人(1)、变位器(2)和变位器旋转大梁(3)组成,所述的弧焊机器人(1)安装在机器人底座(4)上并位于两侧变位器旋转大梁(3)之间,所述的变位器(2)安装在变位器底座(5)上,变位器旋转大梁(3)的两端均支承在对应的变位器(2)上并能在变位器的带动下作任意角度的旋转,变位器旋转大梁(3)上设有用于
2019-12-17 aipaae
-

基于激光跟踪的机器人工作站的制作方法
基于激光跟踪的机器人工作站。 背景技术:如今,社会生产加工制造行业在智能制造2025、工业4.0的不断影响下,工业机器人被越来越广泛的投入应用,其中,焊接机器人工作站在生产中的应用尤为突出。目前,虽然各机器人设备生产厂商已开发出多种用途的工业机器人,但是大部分机器人产品的系统集成能力、柔性化控制、安全等级等方面不是很成熟,而且出现一些瓶颈问题,如生产成本高、设备兼容性差、控制技术协议不对外公开、
2019-12-17 aipaae
-
![双机器人加工工作站]()
双机器人加工工作站
双机器人加工工作站。 背景技术:机器人工作站是指以一台或多台机器人为主,配以相应的周边设备,如变位机、输送机、工装夹具等,或借助人工的辅助操作一起完成相对独立的一种作业或工序的一组设备组合。但是其在实际使用时,仍旧存在较多缺点,如采用单个机械臂进行加工 加工一面完成后需要翻转再加工另外一面,加工效率低。 技术实现要素:为了克服现有技术的上述缺陷,本发明的实施例提供一种双机器人加工工作站,通过设
2019-12-17 aipaae
-
![罐体焊接机器人]()
罐体焊接机器人
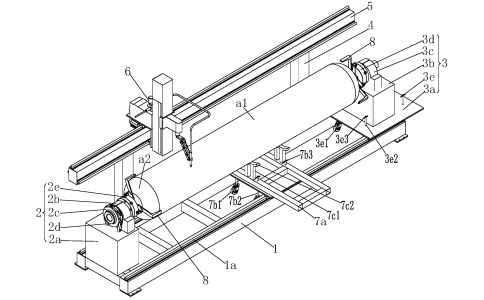
本实用新型涉及焊接领域,特别涉及一种罐体焊接机器人。背景技术[0002]目前,在一些罐体焊接加工过程中,对罐体的环缝焊接通常采用焊接变位机的自动焊接,自动焊接在解决人工焊接质量和效率方面取得了很大进展,但是对一些较大型的罐体,采用焊接变位机难以实现环缝和直缝的自动焊接。发明内容[0003]本实用新型的目的是为了克服上述背景技术的不足,提供一种罐体焊接机器人。[0004]为了实现以上目的,本实用新型
2019-12-17 aipaae
-
![双龙门升降式翻转机的制作方法]()
双龙门升降式翻转机的制作方法
双龙门升降式翻转机的制作方法 技术领域: 本发明涉及一种焊接变位设备,尤其是双龙门升降式翻转机。 背景技术: 为提高产品质量、提高生产率以及减低焊工劳动强度,在工程机械、铁路、桥梁、金属结构等制造业中,焊接机器人及其配套的焊接变位设备的应用越来越多。其中,对于大尺寸(长度及宽度)工件的焊接,需要焊接变位设备适当变换位置将工件调整到最佳位置进行焊接。例如,水泥泵车的臂架(图8所示),通常尺寸长达十几
2019-12-17 aipaae
-
![焊接变位机按照使用方法]()
焊接变位机按照使用方法
焊接变位机根据使用方式也有不同的分类.主要有以下几方面: 1、对云南昆明焊接变位机的功能要求:指变位机械应该能实现什么动作,如平移、升降或者回转等.如果是平移,是直线平移还是曲线平移;如果是回转运动,是连续回转还是间歇翻转等.还要看是焊接变位机是独立运动还是与机器人做协同运动;机器人协同运动的功能更强大,推荐使用协同运动焊接变位机。 2、对运动速度的要求: 必须明确是快速还是慢速,是恒速还
2019-12-17 aipaae