-
![管道焊接机器人的制作方法]()
管道焊接机器人的制作方法
管道系统的焊接机器人。 背景技术:管道是流体的常用运输方式之一,具有占地空间小、成本低等优点。管道系统的焊接式组合与焊接修复通常采用人工的方式,具有成本高、危险性大、管道内交错变化多,行走变道难,工作难度大等不足,而现有的焊接机器人又无法满足管道系统多样性的需求。 技术实现要素:针对上述现有技术存在的问题,本发明提供一种管道焊接机器人,该装置结构简单、操作灵活,能够在管道系统内全方位自如运动,
2019-12-17 aipaae
-
![罐体焊接机器人]()
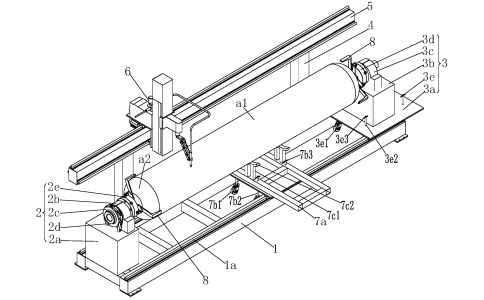
罐体焊接机器人
本实用新型涉及焊接领域,特别涉及一种罐体焊接机器人。背景技术[0002]目前,在一些罐体焊接加工过程中,对罐体的环缝焊接通常采用焊接变位机的自动焊接,自动焊接在解决人工焊接质量和效率方面取得了很大进展,但是对一些较大型的罐体,采用焊接变位机难以实现环缝和直缝的自动焊接。发明内容[0003]本实用新型的目的是为了克服上述背景技术的不足,提供一种罐体焊接机器人。[0004]为了实现以上目的,本实用新型
2019-12-17 aipaae
-
![焊接机器人移动作业平台的制作方法]()
焊接机器人移动作业平台的制作方法
焊接机器人移动作业平台的制作方法 【专利摘要】本实用新型涉及机械加工设备领域,公开了一种焊接机器人移动作业平台。它包括移动平台、轨道,轨道由两条平行的铁轨组成,所述移动平台的表面上安装有作业台面,所述移动平台的底部设有与所述轨道相适配的地轮,所述地轮的侧壁上设有定位孔,所述轨道的侧壁上设有数个制动孔,所述定位孔与所述制动孔的规格相适配,所述轨道的下方铺设有数条相互平行的地轨座板。当移动平台在轨道上
2019-12-17 aipaae
-
![双龙门升降式翻转机的制作方法]()
双龙门升降式翻转机的制作方法
双龙门升降式翻转机的制作方法 技术领域: 本发明涉及一种焊接变位设备,尤其是双龙门升降式翻转机。 背景技术: 为提高产品质量、提高生产率以及减低焊工劳动强度,在工程机械、铁路、桥梁、金属结构等制造业中,焊接机器人及其配套的焊接变位设备的应用越来越多。其中,对于大尺寸(长度及宽度)工件的焊接,需要焊接变位设备适当变换位置将工件调整到最佳位置进行焊接。例如,水泥泵车的臂架(图8所示),通常尺寸长达十几
2019-12-17 aipaae
-
![铝合金电极焊接解决方案]()
-
![钢结构塔杆机器人自动焊接专机技术方案]()
钢结构塔杆机器人自动焊接专机技术方案
风力发电是世界上增长最快的可再生能源之一,能有效解决常规能源尤其是石化能源带来的能源短缺、环境污染及温室效应等问题,全球每年的风能大约相当于每年耗煤量的1000倍以上。目前,风力发电在发达国家已经形成相当的规模,德国、西班牙、丹麦、美国和印度等都得到了大规模应用,2003-2006年,世界风能市场以每年40%的速度增长。2006年以来,石油同煤炭价格超乎预料的持续上涨又进一步加剧了风力发电的增长势
2019-10-17 aipaae
-
![汽车方向盘龙骨焊接机器人工装夹具的组成与结构介绍]()
汽车方向盘龙骨焊接机器人工装夹具的组成与结构介绍
目前的汽车方向盘龙骨完全是人工焊接费力、费时、成本高、人力资源贵,不安全。没有完整焊接,造成工件浪费极大。为了解决人工焊接难题,苏州品超智能设备有限公司研发了焊接机器人替代传统人工焊接,焊接机器人由焊接电源、机器人本体、送丝机械、控制系统、工装夹具等组成。现有汽车方向盘龙骨焊接不完整以及汽车方向盘装夹定位不准确问题,因此工装夹具的选择也是决定焊接质量的关键因素。1、工装夹具的组成:机器人汽车方向盘
2019-10-17 aipaae
-
![汽车弧焊机器人工作站生产流程及系统方案]()
汽车弧焊机器人工作站生产流程及系统方案
弧焊机器人工作站的主要由焊接机器人系统与焊接电源两大部分构成,在焊接机器人中有时需要用到变位机,该变位机可以进行翻转从而协助焊接机器人进行柔性化焊接,从而保证了焊接工件的均一性;焊接夹具是用于工件的定位,使其方便焊接机器人焊接作业,从而保证了工件安装定位准确;电气控制系统可用于整个机器人焊接工作站设备的控制与管理,有全自动循环功能、单循环功能、暂停功能等;控制柜是用于整个焊接机器人工作站的启动、停
2019-10-17 aipaae